Digitimes 無人載具技術關鍵路徑研討會活動
瞭解更多關於無人機高密度電源轉換的詳情
By Anna Giasson and Stavros Dokopoulos
可通過對供電網路 (PDN) 的優化設計,提高移動機器人的工作範圍、生產力和靈活性。由於電池電源電壓的變化以及各種各樣的負載,其可能是諸如大功率 AI 計算系統、電機驅動器、傳感器、通信系統、邏輯電路板和處理器等典型系統的一部分,因此這種 PDN 中有複雜的電源系統設計和架構注意事項。此外,在開發使用大功率開關穩壓器的密集系統時,也會自然而然地產生 EMI 注意事項 。因此,機器人電源系統面臨許多獨特的挑戰,需要全新的方法來應對。
使用 Vicor 高密度、高性能電源模組的模組化 PDN 設計方法可應對這些挑戰。瞭解基本工程原理以及超級計算應用的經驗,探索如何利用 Vicor 固定比率電源轉換器寬輸入範圍的高效率零電壓開關 (ZVS) 降壓或升降壓穩壓器來提高高級機器人電源系統的性能和設計靈活性。
要考慮的兩種方法:
使用固定比率轉換器來有效提高或降低電源電壓,並在相同的 PDN 內增強其動態響應能力,或使其適應更高電壓的電源。
這兩種電源拓撲的各種供電網路架構可爲設計人員實現符合其設計目標的移動系統提供多種選項。
爲高級機器人設計電源系統時,針對每個所需的負載電壓簡單地重複使用可靠的 DC-DC 轉換器極具吸引力,因爲這種需求以全新的有效載荷形式出現,無論是爲 LIDAR、GPU、伺服驅動器供電,還是爲 LED 探照燈等恆流負載供電,都是如此。不斷發展的系統複雜性也適時表明了需要對電源需求和架構進行更全面的瞭解。爲使用最新電源轉換器技術設計電源系統提供了顯著的尺寸、重量、性能及成本優勢。只有在負載容限範圍大、電池電壓範圍窄以及隔離層數量少的情況下,在最大功率持續時間短以及待機時間長的系統中,這些優勢才會增加。使用更高效率的更新非隔離降壓或升降壓轉換器,即使輸入電壓高於 24V,也可提高整體系統性能。
固定比率轉換器支持低阻抗路徑和快速瞬態響應。這些產品的智能佈置有助於電機驅動器等負載快速提取電流,消除了穩壓 DC-DC 變換器固有的響應延遲,以及長距離低壓線纜上的壓降。
這兩種方法都能實現本文將探討的全新架構解決方案。
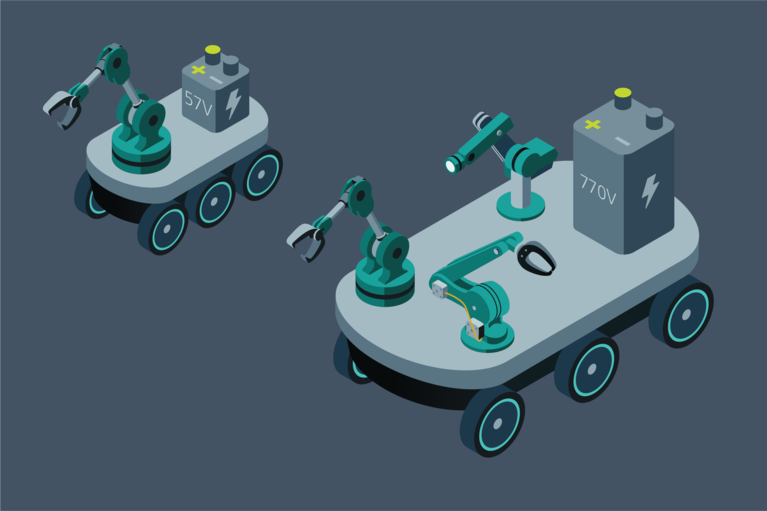
考慮兩個機器人平台,它們的電池電源和各種高功率負載如圖 1 所示。爲了簡單起見,該電池可作爲第一款支持 15-S LiFePO4 和 57V 浮動電壓的電池,就像用於帶操作器或其它伺服驅動器的越野“最後一英里”送貨機器人一樣;與基於 24V 或 48V 的系統相比,57V 可提高能量密度。想象一下,如果還要求在一個更大的平台上安裝相同或更強大的“大腦和肌肉”,比如自動駕駛卡車或帶 200-S 電池(支持 770V 浮動電壓)的收割機機器人,或者從頭設計,該怎麼辦。

圖 1:這兩個機器人平台的規模 大不相同,但它們的供電網路卻有很多共同之處。模組化方法有助於高度靈活地完成初始設計,通常能加速交付後續電源系統設計。
負載要求如下:
從負載需求反向推理,可構建一個電源樹,展示如何產生每一組所需的電壓(圖 2)。這種方法可幫助設計人員優化設計中的穩壓級、隔離級及變壓級數量。這可減少與不必要複雜架構、噪聲、穩定性問題及不良壓降有關的損耗,帶來一個可擴充、通用的簡單高效電源解決方案。

圖 2:由 110VDC SELV(安全超低電壓)電池或 770V 較大車輛電池(降壓至大約 48V)供電的較低電壓電源供電網路。
從 24 或 57V 電池等超低電壓電源供電時(圖 2),所有負載通常都連接至電池負極,無需隔離式 DC-DC 轉換器。更好的設計將採用現代高壓降壓轉換器,在低待機功耗下提供 96 ~ 97% 的效率,延長電池使用壽命。如果輸入輸出電壓比允許降壓轉換器在佔空比最有效點附近工作,共模 EMI 噪聲就會非常小。在本示例中,最佳降壓工作需要將大約 57V 的電池電壓降至大約 12V。
許多基於 MOSFET 的硬開關降壓轉換器在使用 24V 以上電壓(而非較低的VIN)供電時,由於開關損耗,會出現過熱,其“97% 的效率”是指定的。例如,從 24V 平臺升級到 48V 或 57V 時,開關損耗將呈指數級增長,而且與 VIN 成正比,產生的熱量顯著增加。降低開關頻率,不僅可降低損耗,而且還可最大限度降低接通時間問題,但這會增大輸出電感器及電容器的尺寸。
在這裏,48V 背板在其它高功率計算及汽車應用中的迅速採用,爲同理改進機器人系統提供了模型。因此,一些製造商已針對超過 48 至 12V 的輸出將降壓轉換器的效率提高到真正的 96 — 97%,而且對於低至 2.5V 的輸出而言,結果類似。
圖 3 從所提供的選擇的角度,顯示了在 80% 負載的相同條件下,使用 40 至 60V 輸入的幾款 600W、12V 轉換器的典型效率、損耗和尺寸:

圖 3:600W、48 - 12V 解決方案可擴充,包括所需的外部組件。(A) 2 個 36 - 75V、320W 隔離式穩壓模組。(B) 3 個 43 - 154V、240W 寬範圍隔離穩壓模組。(C) 4 個 30 – 60V、216W、18A 降壓轉換器。(D) 1 個 40 – 60V、750W 固定比率轉換器。(E) 1 個 40 – 60V、750W 升降壓 + 固定比率。使用生產單元測量的功耗。
圖 3:600W、48 - 12V 解決方案可擴充,包括所需的外部組件。(A) 2 個 36 - 75V、320W 隔離式穩壓模組。(B) 3 個 43 - 154V、240W 寬範圍隔離穩壓模組。(C) 4 個 30 – 60V、216W、18A 降壓轉換器。(D) 1 個 40 – 60V、750W 固定比率轉換器。(E) 1 個 40 – 60V、750W 升降壓 + 固定比率。使用生產單元測量的功耗。
對於比典型降壓轉換器在不降低開關頻率、增大體積,也不過多影響性能的情況下,能處理的更大的電壓差,可採用數據中心應用中常用的模組化兩級 DC-DC 方案 (分比式電源) (圖 4)。36 - 75V 升降壓穩壓器在效率爲 96 - 98% 時,在 97.8% 4:1 電流倍增器(以下討論的固定比率轉換器)的輸入端設置精確的 48V 電壓,以實現更小的空間和高動態性能、高可靠性和高效率。可從電流倍增器的輸出獲得穩壓器反饋,改進穩壓。在 60V 以上選擇 75V 額定值,因爲在電機驅動環境中,電源電壓可能會出現超過 60V 的峰值,如下文所述。

圖 4:由兩個轉換級組成的 720W(1kW 峰值)48 - 12V 降壓轉換器的示意圖。
正弦振幅轉換器 (SAC™) (圖 3D)等固定比率轉換器,與降壓轉換器或隔離 DC-DC 轉換器相比,可提供最高的效率性能。顧名思義,它們以 K = VOUT/VIN 的固定比率將輸入電壓 (VIN) 轉換爲輸出電壓 (VOUT),沒有對其進行穩壓。在沒有任何控制環路延遲的情況下,輸入電壓的任何波動都會導致按 K 縮放的輸出波動。
從概念上講,SAC 轉換器的內部工作有三級:
通過在開關級使用零電流、零電壓開關 (ZCS/ZVS) 技術,可在固定比率轉換器中實現高達 98% 的效率,從而不僅可最大限度降低開關損耗,而且還可實現比硬開關轉換器高很多的開關頻率(通常在幾 MHz 範圍內)。隨後將按比例減少無功組件和 EMI 濾波器,這不僅可降低空間佔用,而且還可顯著提高功率密度。
固定比率轉換器與 AC 變壓器類似,AC 變壓器自身基本都是用於電網配電的固定比率轉換器。變壓器有助於在世界各地進行實際配電。採用比電源和負載電壓幾倍高的電壓來遠距離傳輸功率,明顯會降低在這些高電壓下傳輸的電流,這不僅產生了輕量級低成本的傳輸線路,而且還帶來了只有負載點附近低壓線纜的短時間運行。模擬跨越多個點,因爲固定比率轉換器也可高效實現電池升壓的雙向工作/重新生成,爲許多較高電壓負載供電,這實際可創建一個虛擬的較高電壓電池和/或傳輸線路。它還允許應用在高壓電池或母線中重新生成制動能量。固定比率轉換器不僅可輕鬆並聯,而且天生就能使用Droop 均流方法,均流精度主要看每個並聯支路的阻抗。
許多 DC-DC 轉換器等隔離式固定比率轉換器能夠與輸出串聯(圖 5),從電池生成多個獨立輸出,不僅無需在移動設備中提供輔助電池,而且還可在簡化機器人框架設計的同時,減少轉換器數量並減輕系統重量。例如,假設一款 400V 系統需要低阻抗 12V 及 24V 電壓軌。兩款輸出串聯的隔離式 1:32 轉換器可能會通過使用串行連接或其中點創建兩個母線,帶來無限可能。

圖 5:輸入並聯、輸出串聯的隔離式固定比率轉換器,可疊加其輸出電壓。
固定比率轉換器從一次到二次反射阻抗,類似於聯網 AC 變壓器。這在機器人應用中非常有優勢,因爲當阻抗在變壓器上反射時,其量級將按其轉換比的平方擴充。

圖 6:阻抗反射可按K2 的因數降低有效電源的阻抗,從而可減少所需的電容。
即使在低電壓系統中,如最初示例中的兩個移動機器人,也可利用阻抗反射效應來最大限度提高儲能元件(如大型旁路電容器、EMI 濾波器和其它電路參數等)的效用。考慮在大型機器人框架間配送高電壓,然後將其轉換爲低電壓用於諸如伺服驅動器或人工智能處理器等高動態負載的 770V 自動駕駛汽車系統:從負載角度回顧電源,除了所有配電阻抗外,電池阻抗似乎都會遠遠低於實際阻抗。
使用 K = 1/16 固定比率轉換器 (BCM4414) 將 770V 電池電壓轉換爲大約 48V 時,其結果是降低電源阻抗,因此輸入電容降低了 256 倍,如圖 6 所示。鑑於 RESR、額定電壓、使用壽命和性能,這種輸入電容器的物理尺寸只是等效輸出電容器尺寸的一小部分,而等效輸出電容器的尺寸與轉換器本身的尺寸相當。使用穩壓 DC-DC 轉換器,這在一定程度上是可以實現的。與固定比率轉換器相比,這些轉換器的穩壓環路的帶寬要低很多。這些相關延遲加上與許多轉換器斷續導電模式相關的延遲,有效增加了其阻抗,限制了相關作用。
對於這些高度動態的強大負載,降低電阻及電感阻抗,可改善動態與靜態性能。電機通常使用具有高瞬態電流變化的高頻率脈衝驅動,因此明顯的電源阻抗將使在其終端提供的電壓和電流失真。同樣,廣泛 PDN 內的寄生電感會限制提供給電機繞組的電流,從而限制轉矩。
隨着電源需求的增加,由於以上原因,我們需要將簡單的原理用於配電路由及線束,利用所討論的轉換器探索更高電壓的配電(轉換至接近負載的負載電壓),以便較低電流減少配電損耗、(動態)壓降以及 EMI 干擾。此外,低電感佈局與佈線(利用在相鄰 PCB 層上提供密閉環路、雙絞線或路由的磁場抵消)可能也有幫助。轉換器一般需要其電源的 AC 阻抗比負載阻抗(達到其控制環路的帶寬)小 10 倍,特別是在動態負載限制壓降時,如圖 8 示例所示,這符合穩定性分析的 Middlebrook 標準。因此,在優化安培容量的線規時,其 AC 阻抗可通過在轉換器的輸入端提供適當大小的電容器來降低,也可降低較長線路運行時的 AC 流耗和干擾。
在電池使用壽命方面,DC-DC 轉換器的損耗似乎可以忽略不計,因爲這些損耗通常比其負載低一個數量級,但當相關負載處於睡眠模式時,它們可能會欺騙性地以空載損耗的形式累加。正如所有數據表顯示的那樣,基於變壓器的 DC-DC 轉換器在啓用運行其控制並磁化/消磁主要開關變壓器時,通常會消耗大量的電源;它們可以輕鬆累加至其全部電源容量的 0.5 - 1%。一些穩壓轉換器在空載時功耗甚至更大,因此需要(或構建)一個爲最大負載百分之幾的預加載來穩定輸出。
不需要時,禁用這些轉換器及其負載,可能是一個很好的選項,但即使禁用,功耗可能也會很大。
儘可能少選基於變壓器的轉換器,理想情況下每個隔離層都需要一個,然後再部署降壓或升降壓轉換器,爲相同的返回路徑提供額外的輸出,這樣可相應減少空閒損耗。
由於採用脈衝跳變或更高級技術,許多降壓或升降壓轉換器的靜態電流都以毫安爲單位。
如果負載的輸入電壓範圍等於或大於電源的輸入電壓範圍,固定比率轉換器由於其尺寸、效率和性能原因,可能是最好的選項。
一個 770-48V 1.5kW 固定比率轉換器(圖 7)的損耗大約是一個穩壓 DC-DC 正向轉換器損耗的 1/2 - 1/3,因爲穩壓 DC-DC 正向轉換器有穩壓級,在變壓器中有額外的損耗。一個不太合適但很實用的比較是,之前從車輛 AC 發電機提供相同驅動的 AC-DC 轉換器,整流器和典型 PFC 升壓級會產生額外的損耗。這進一步說明了在建築物、大型設備或機器人車輛中使用 DC 電網的優勢。後兩項最新開發相比之下分別可達 94% 和 91%,但固定比率轉換器沒有相同的穩壓功能或相關損耗。

圖 7:(從上到下)K = 1/16 帶散熱器的固定比率轉換器、一款帶散熱器、在市場上提供的穩壓 DC-DC 轉換器陣列,以及一款以發電機爲導向的 AC-DC 轉換器(風扇散熱)。
直接從電池給電機驅動器供電時,電池及線纜阻抗會導致壓降,而且這些阻抗也會限制電流。壓降和電流限制都與線規和負載距離電源的距離有數學關係。
使用固定比率轉換器降低負載位置出現的有效電源阻抗,但這也會提高轉換器位置出現的、最終將出現在電源位置的峰值電流。爲防止過流及短路故障,在轉換器中構建的保護可能會由高動態負載觸發,設計時應加以考慮。
例如,如圖 8 所示、爲 4 個 35A、K = 1/16 固定比率轉換器供電的 770V 輸入電壓和電流(如圖 7 所示)。將圖 6 作爲框圖,ROUT = 3.5mΩ、ZPDN = 10Ω(包含可忽略的電池阻抗),爲 48V 電機驅動器供電。
將轉換器佈置在電機驅動器附近,使其僅在 10/256 = 約 40mΩ 時,出現 10Ω 阻抗源,共 43.5mΩ,包括無 48V 線纜的 ROUT。源出的峰值電流爲 14.7A,因爲除了平均電流外,低阻抗轉換器還提供 PWM 電流峰值,需要將其指定爲 4 - 5A 的更高峰值電流容量。
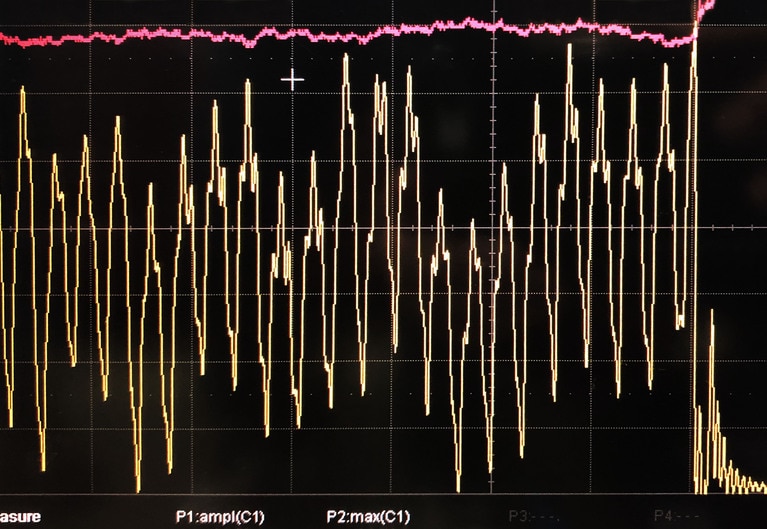
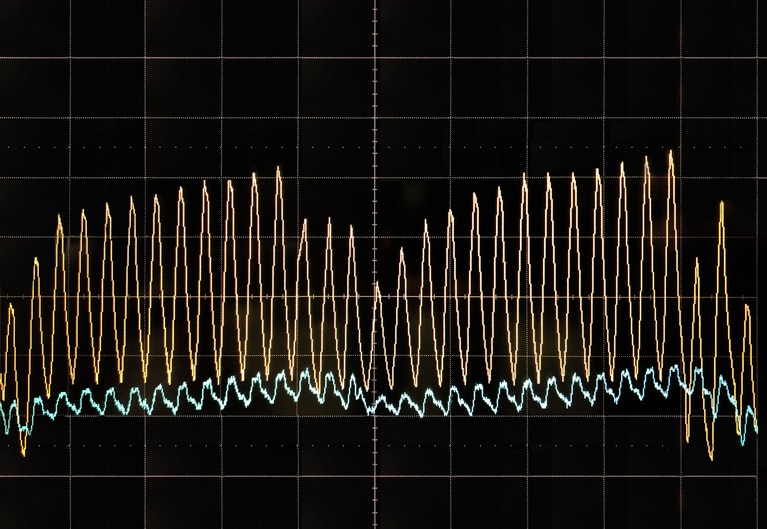
圖 8:(左)20ms/div 的 770V 輸入端的示波器圖像、在 100V/div 時爲【紅色】、2A/div 的電流【黃色】,通過一個 6kW【峰值 8kW】固定比率轉換器加速 48V 電機,顯示加速步驟和 PWM 脈衝;(右)100µs/div 的峰值詳細信息。
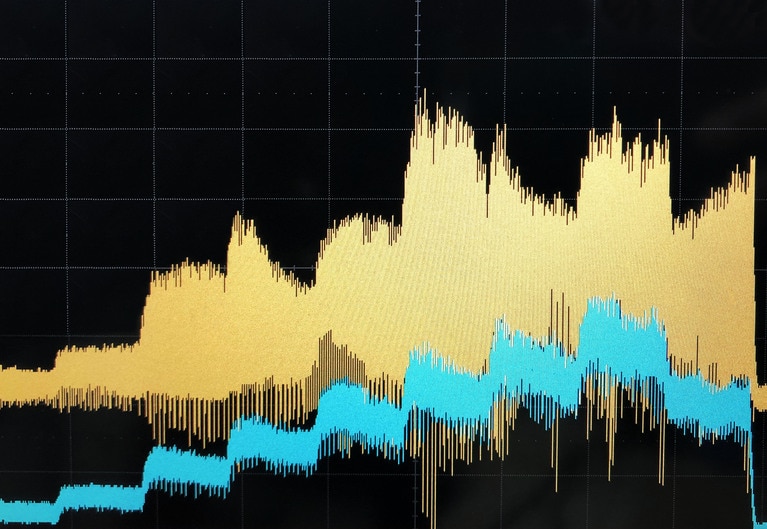
圖 9 是阻抗反射的作用。在輸出端使用一個 10µF、30mΩ RESR 輸入電容器,而不是龐大的 10mF、3mΩ RESR 電容器。這將電源線上的輸入紋波電流從 11 降到了 1AP-P,大大降低了 AC 阻抗從 10Ω 降至大約 1Ω 帶來的損耗。通過小型輸出 LC 濾波器將峰值電流降至 9.75A,高於轉換器 8.75A 的連續電流限制,但完全在 14A 的短期電流限制範圍內。
圖 9:40A/div 時,轉換器輸出爲 180APK(黃色);2A/div 的輸入電流(藍色)。通過輸入端佈置的電容減少紋波。(左)20ms/div(右邊)0.1ms/div.
啓動時,電機驅動器和計算電路板充當大電容負載。計算卡可能有大量的板載降壓轉換器,每一個都配有大容量輸入電容器和/或額外的 LC 濾波器。爲其供電的 DC-DC 轉換器需要有一個指定的容許外部負載的寬範圍電容,或者在後面佈置某種形式的預充電電路,以支持大電容負載,這是使用固定比率轉換器爲電機驅動器供電經常出現的情況。
此外,這也是設計後期經常忽視的項目。一些穩壓器,特別是升降壓穩壓器,也針對電池充電進行了精心設計,支持單獨的電流控制環路和/或可調軟啓動時間,允許它們與海量負載電容聯用。
在動態運行或制動時,電機驅動器可作爲發電機 (8)。在我們的 57V 示例中,主電機驅動器的再生反向電流將通過連接線束給電池充電,沿着路徑提高其電壓,使其與相關阻抗成比例,可能會達到 60V 以上。隨後,任何由它供電的 DC-DC 轉換器的電壓都不要額定爲通用 60V,而是更高。
此外,圖 6 中的原理圖也適用於其中由雙向轉換器爲這種電機驅動器供電的配電網路,如圖 8 中的示例所示。再生能量可通過該轉換器提高與 ZOUT 成比例的低電壓及高電壓端電壓。如果轉換器爲單向,這種再生能源就會被阻塞,只能給輸出電容器 COUT 充電。因此,再生能源及其產生的電壓上升應該受到限制,如果可能的話,應保持在轉換器和 COUT 的最大輸出電壓規範範圍內,也可實施一個制動電路來吸納該能量。
爲了優化性能,擴大工作範圍並提高生產力和靈活性,我們鼓勵機器人系統設計人員繪製其應用的電源樹,權衡不同類型的轉換器組合及 PDN 設計策略。在整個平臺上配送較高電壓並在負載點附近 將其變爲所需的電壓,非常有優勢。
創造性地使用 Vicor 高密度、高性能固定比率轉換器模組和降壓和/或升降壓穩壓器模組,可通過高效輕量級的供電爲每個負載實現最佳性能。將這些技術結合起來,就可對具有適度寬輸入範圍的高效率、非隔離式終端功率級執行標準化。這些可通過配置適當傳輸比的固定比率轉換器連接至較高電壓電池架構。
Anna Giasson 是位於馬薩諸塞州安多弗的 Vicor 公司的一名應用工程師。她採用有源 PFC 設計了開關模式 AC-DC 電源。Anna 於 2015 年畢業於溫特沃斯理工學院,獲電氣與電子工程學士學位,現在她正在伍斯特理工學院攻讀電氣與電子工程碩士學位。
Stavros“Steve”Dokopoulos 是 Vicor 弗吉尼亞州里士滿公司的一名現場應用工程師。他於 1989 年畢業於希臘塞薩洛尼基亞里斯多德大學 (Aristotle University of Thessaloniki),獲電氣與電子工程碩士學位,此後一直在電源電子行業工作。
曾在 2020 年 12 月發表於 IEEE Power Electronics,題爲“重新構思移動機器人的供電網路”。

