

Digitimes 無人載具技術關鍵路徑研討會活動
瞭解更多關於無人機高密度電源轉換的詳情
在無人機中綜合更多功能會新增有效載荷重量,因此必須功率密集、靈活可擴充,才能適應變化。
繫留無人機和無人駕駛飛機的市場正在高速增長。 預計到 2020 年將同比增長 61%,這一增長源於日益增多的應用和使用案例,可從持久的空中平臺受益。
與續航時間有限的非繫留無人機不同,繫留無人機無需攜帶主電源,進而新增有效載荷能力。
它們可在高達 200 米的空中和絕大多數天氣條件下續航長達 24 小時。 應用包括傳統安保、情報收集以及監控。 它們的長時間飛行能力使它們非常適合在發生人道主義危機時提供緊急電信網路,非常適合監控大型工業園區消防情况,以及拍攝大型戶外體育賽事。 隨著繫留無人機應用於更多新場景,技術挑戰也隨之增多。
在無人機中綜合更多功能的願望會新增有效載荷重量,而提升工作高度獲得的優勢則會帶來更大的繫線阻力。 此外,延長飛行時間就得新增安全監控,提供備用電源並配備降落傘等安全設備。
為繫留無人機供電帶來了一些技術挑戰。 無人機的功率需求由轉子驅動電機、控制電子設備和有效載荷應用驅動,其中電機占可用功率預算的最大比例。線纜存在電阻,因此通過長繫線傳輸足够的功率會產生傳輸損耗。
實現最大的有效載荷,需要將繫線的阻力重量保持最小,從而會限制導線粗細。 較細的導體會新增線纜電阻,電阻會隨工作高度的新增而變大。
要達到無人機的供電要求,保持低配電損耗的唯一可行選項就是沿繫線傳輸高壓並在無人機內將功率轉換至所需的水准。 重量是一項關鍵限制,因此電源轉換組件也需要輕量化。
使用高壓直流减少了繫線中的電流(I = P/V),允許使用小直徑的繫線導體,還可降低 I2R 損耗。 該行業趨勢是在繫線中傳輸高達 400VDC 的電源,並在無人機中使用一個或多個 DC-DC 轉換器為轉子電機和應用電路供電。
有眾多供應商提供大量的 DC-DC 轉換器,但是找到一款支持高達 400VDC 電壓輸入的轉換器會顯著縮小可用選項的範圍。 此外,該轉換器還需要有寬泛的轉換比,比如降壓至 48VDC 輸出。
適合這項任務的 DC-DC 轉換器的一個實例就是 Vicor BCM6123 系列高壓母線轉換器模組。
BCM6123 系列中的每個模組都有固定的轉換比,稱為 K 因數,而且效率都很高,通常為 98%。 例如,BCM6123xD1E5135T01 接受高達 400VDC 的輸入電壓,K 因數為 1/8,能够提供高達 1750W 的功率。 固定比率轉換器也稱母線轉換器,通常未綜合輸出穩壓,但這可根據需要通過進一步的下游 DC-DC 轉換器實現。
固定比率轉換器不包含穩壓組件,因此它們具有高效率以及更高功率密度的潛力。 更少的廢熱還可簡化對熱管理的需求,進一步減輕重量。
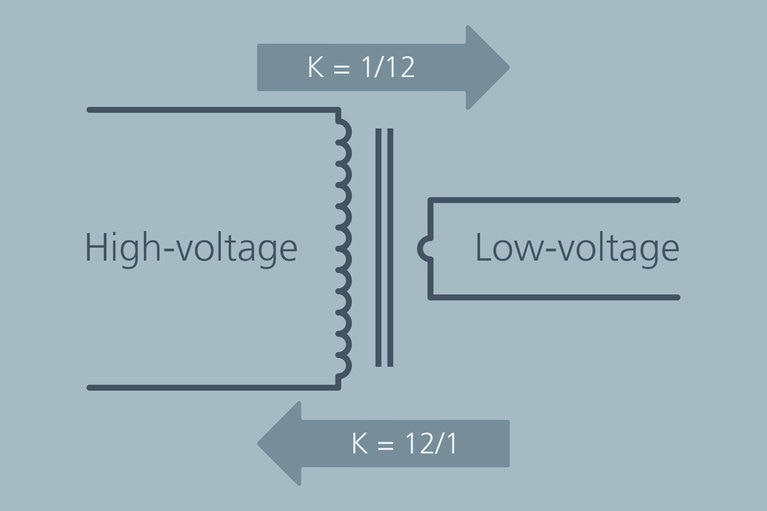
圖 1:固定比率轉換器對輸入電壓進行升壓和降壓,適用於雙向功率轉換。
圖 1 是一款 K 因數為 1/12 的隔離式固定比率轉換器。 基於 BCM 系列的設計,它們可用於升壓或降壓。 請注意,如果需要其反向工作,從低壓電源產生高電壓,則轉換器需要首先按正常正向模式啟動。 在本實例中,400VDC 輸入將實現 33VDC 的輸出。
同樣,低壓側的 33VDC 輸入將產生 400VDC 的輸出。 Vicor BCM® 系列固定比率轉換器既可以並聯配寘,滿足更高輸出功率的需求,也可以串聯配寘,提供更高的輸出電壓。
BCM 系列的所有模組都使用正弦振幅轉換器(SAC™) 拓撲提供高水准的轉換效率。 大多數 DC-DC 轉換器拓撲使用轉換器脈寬調製(PWM)切換驅動電路的占空比來控制二次功率輸出。 為了將切換器件損耗保持在最低的實際限制,PWM 頻率不超過幾百 kHz。

圖 2:正弦振幅轉換器的簡化電路。
SAC 是一種基於變壓器的諧振拓撲。 切換轉換器在一次側 LC 等效電路的固定諧振頻率下工作。 在電壓平衡點執行開關可消除切換器件的功耗,從而可顯著提高轉換效率並减少高階雜訊諧波的產生。
與改變使用方波驅動訊號的 PWM 占空比不同,SAC 轉換器不僅使用明顯更高的頻率(通常為幾兆赫茲),而且還可調整驅動訊號的幅度,以適應新增的輸出負載。 使用更高的切換頻率有助於進一步縮小變壓器的尺寸,從而使其更輕。
繫線線纜的電路特徵需要作為設計過程的一個環節進行研究,關鍵要素有電阻、電容以及組織長度的電感。
短繫線可作為一個主體 LCR 電路,但較長的系線更像一根具有分佈式 LCR 内容的傳輸線。繫線的類比有助於處理傳輸線效應,特別是初始接通時的輸入浪湧。
用輸出濾波器正確終止系線,可減輕輸入浪湧對無人機的影響。 一般來說,如果功率尖峰的上升時間大於線路延遲的十倍,則認為繫線線纜較短。
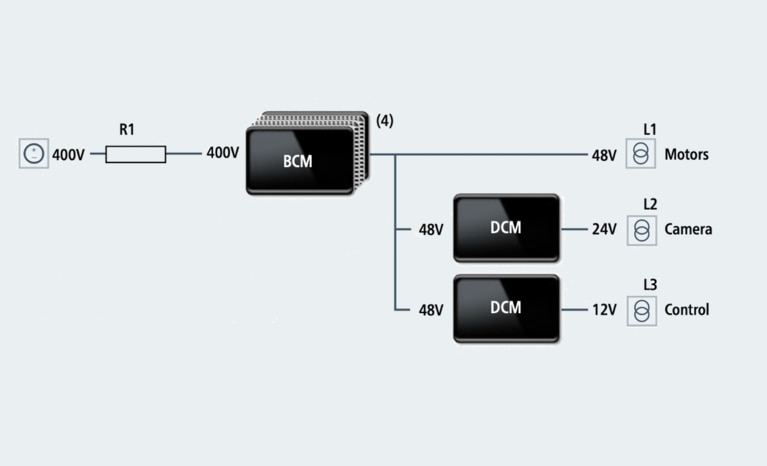
下圖 3 突出顯示了無人機高壓 DC 傳輸解決方案的簡化功能圖。 無人機的 400VDC 電源使用四款 BCM6123 固定比率母線轉換器提供隔離和 48VDC 母線供電。 母線電壓直接為轉子電機供電,兩款 DCM™ DC-DC 轉換器將 48VDC 母線電壓轉換為單獨的 12VDC 和 24VDC 穩壓電源,為控制及遙測電子設備以及無人機的視頻監視器供電。
圖 3:通過 400VDC 繫線為無人機供電的示例應用。
採用這種配寘實現了功率密度為 2750W/in3 的 5kW 機載電源,電源轉換器的總重量(4 個 BCM 和 2 個 DCM)僅為 222 克。
BCM 轉換器的雙向功能也使其非常適用於無人機的地面電源。由 48VDC 電池供電,將為繫線電源提供 400VDC 的電壓。
高壓、固定比率母線轉換器是繫留無人機供電的高效方式。 它們具有最小的散熱器要求、節省空間的方法及輕質量,有助於無人機設計工程師最大限度提高有效載荷能力並减少繫線阻力。
此外,正弦振幅轉換器的低 EMI 特征可减少對龐大濾波組件的額外需求,進一步提高了無人機的有效載荷能力。
本文最初由 Electronic Specifier 發佈。

